kubectl管理多集群
1. K3s指定集群管理IP
在k3s.service中添加启动参数
1 | --advertise-address=<192.168.x.x> |
详细参考官方文档以及 基于K3s搭建GitOps环境1-K3s安装
查看当前Context
1 | kubectl config current-context |
2. 配置集群信息
查看context列表
1 | kubectl config get-contexts |
输出中带有*的Context表示当前活动的Context
切换到指定Context
1 | kubectl config use-context <context_name> |
在指定Context中执行命令,一般用于临时使用
1 | kubectl --context=<context_name> <exec_cmd> |
3. 合并配置文件
在 Kubernetes 环境中,使用 kubectl 管理多个集群非常常见。通过配置 kubeconfig 文件,可以轻松切换和管理多个集群。以下是实现方法的详细步骤。
方法 1: 合并多个配置文件
准备配置文件 假设已有两个集群的配置文件:_
/.kube/config1_ 和 _/.kube/config2_。合并配置文件 使用以下命令将多个配置文件合并为一个:
KUBECONFIG=/.kube/config1:/.kube/config2 kubectl config view –merge –flatten > ~/.kube/config
- 验证合并结果 查看合并后的配置:
kubectl config view
方法 2: 配置环境变量
- 设置环境变量 将多个配置文件路径添加到 KUBECONFIG 环境变量中:
export KUBECONFIG=/.kube/config:/.kube/test-config
- 验证配置 执行以下命令查看所有集群信息:
kubectl config get-contexts
方法 3: 手动编辑配置文件
打开配置文件 编辑 ~/.kube/config 文件,将其他集群的 cluster_、_context 和 user 信息粘贴到现有配置中。
格式示例:
1 |
|
切换集群上下文
查看当前上下文:
1
kubectl config current-context
切换到其他上下文:
1
2
kubectl config use-context <context_name>最佳实践
使用合并或环境变量的方法更高效,避免手动编辑出错。
定期备份 kubeconfig 文件,防止误操作导致数据丢失。
确保每个集群的访问凭证和权限正确无误。
通过以上方法,您可以轻松管理多个 Kubernetes 集群,提高运维效率。
大家好!在 云原生 的世界里,和 Kubernetes 打交道是家常便饭。如果我们像我一样,需要同时管理多个 Kubernetes 集群——比如一个用于严谨发布的 生产环境 ,一个用于大胆实验的 测试环境 ,甚至还有本地开发环境——那么高效、安全地在它们之间切换就成了必备技能。
很多朋友(包括我自己有时也会!)可能会因为一段时间没用而忘记 kubectl 中那些用于切换配置的命令。别担心,这很正常!今天,我们就来系统地回顾一下 kubectl 配置管理的核心概念—— 上下文(Context) ,以及如何利用它在不同集群间自如切换。
核心概念:kubeconfig 文件与上下文(Context)
kubectl 的所有配置信息都存储在一个或多个 YAML 文件中,默认情况下是 $HOME/.kube/config 。这个文件我们通常称为 kubeconfig 文件。把它想象成我们的 Kubernetes “护照”,里面记录了我们能访问哪些集群,用什么身份访问。
一个 kubeconfig 文件通常包含三个主要部分:
- Clusters(集群) :定义了我们要连接的 Kubernetes 集群的信息,比如 API Server 的地址和集群的 CA 证书。
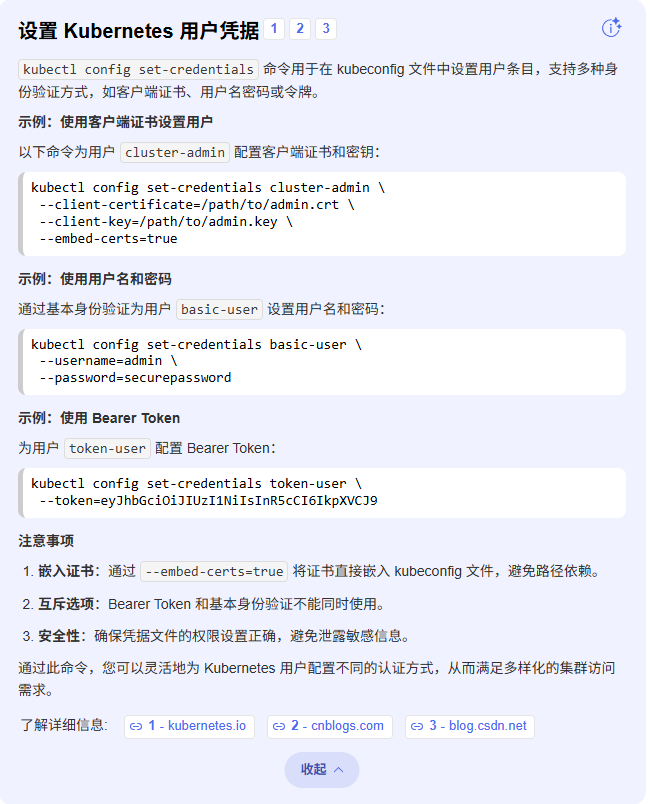
- Users(用户) :定义了访问集群所使用的凭证,可能是用户名/密码、Token 或客户端证书。
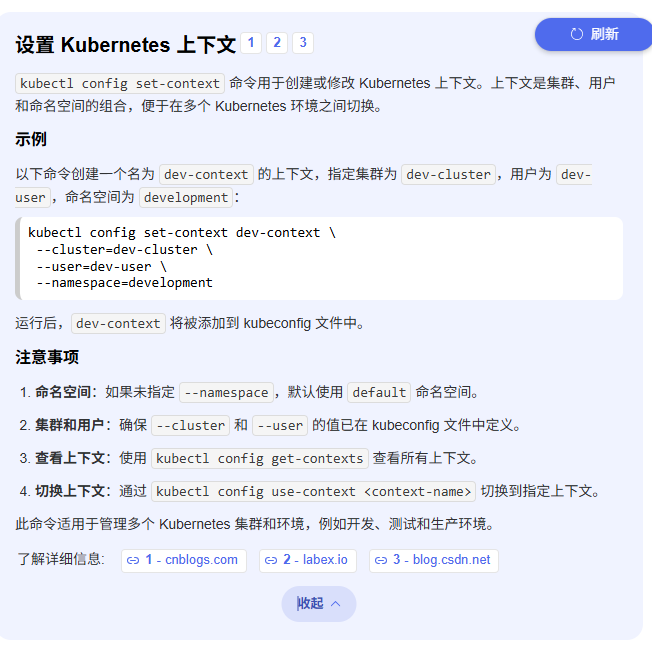
- Contexts(上下文) :这是连接 集群 和 用户 的桥梁。一个 Context 定义了使用哪个 User 凭证去访问哪个 Cluster。
关键点: 我们可以通过切换 Context 来改变 kubectl 当前操作的目标集群和使用的身份。
管理 kubeconfig 的常用 kubectl config 命令
kubectl 提供了一套 config 子命令来帮助我们查看和管理 kubeconfig 文件。以下是几个最核心、最常用的命令:
1. 查看当前配置:kubectl config view
这个命令会显示我们当前的 kubeconfig 文件内容(或者合并后的内容,如果我们配置了多个文件)。它会隐藏敏感信息(如证书和 Token 的具体内容),非常适合快速检查配置概览。
1 | kubectl config view |
如果我们想看某个特定 Context 的详细信息,可以加上 --context 参数:
1 | # 查看名为 'prod-cluster' 的 context 细节 |
2. 列出所有可用的上下文:kubectl config get-contexts
这是 最常用 的命令之一,它会列出我们在 kubeconfig 文件中定义的所有 Context。当前正在使用的 Context 会在名称前用星号 * 标记。
1 | kubectl config get-contexts |
从上面的输出可以清晰地看到:
- 当前激活的 Context 是
test-cluster。 - 还有名为
prod-cluster和docker-desktop的 Context 可供切换。
3. 查看当前使用的上下文:kubectl config current-context
如果我们只想快速确认当前 kubectl 命令会作用于哪个 Context(哪个集群),这个命令最直接:
1 | kubectl config current-context |
4. 切换上下文:kubectl config use-context <context-name>
这绝对是 核心中的核心 !当我们需要将 kubectl 的操作目标从一个集群切换到另一个集群时,就使用这个命令。
假设我们想从当前的 test-cluster 切换到 prod-cluster :
1 | kubectl config use-context prod-cluster |
切换成功后,我们可以再次使用 kubectl config current-context 或 kubectl config get-contexts 来验证当前上下文是否已更改。
1 | kubectl config current-context |
现在,所有后续的 kubectl 命令(如 kubectl get pods, kubectl apply -f ... 等)都会默认发送到 prod-cluster 所定义的集群,并使用 user-prod 的身份进行认证。
实践场景:在生产和测试集群间切换
假设我们的 kubeconfig 文件中已经配置好了代表生产环境和 测试环境 的 Context,可能分别命名为 production 和 testing 。
我们的日常操作流程可能是这样的:
- 检查当前在哪: 或者看列表:
1
2kubectl config current-context
bash11
2kubectl config get-contexts
bash1 - 需要操作测试环境:
1
2
3
4
5
6kubectl config use-context testing
# 验证一下(可选但推荐)
kubectl config current-context
# 现在可以对测试环境执行操作了
kubectl get pods -n test-namespace
bash12345 - 需要紧急处理生产环境问题:
1
2
3
4
5
6kubectl config use-context production
# 验证一下
kubectl config current-context
# 操作生产环境(请务必小心!)
kubectl get deployment -n critical-app
bash12345 - 完成生产环境操作,切回测试环境继续工作:
1
2kubectl config use-context testing
bash1
提升效率的小贴士
- 清晰命名 Context :给我们的 Context 起一个能清晰表明环境和用途的名字,比如
gke-prod-eu,eks-dev-us,local-minikube等。避免使用模糊不清的名字。 - 使用 Shell 别名 :很多人喜欢为
kubectl设置别名,比如alias k=kubectl。这样我们的命令可以更短:k config get-contexts,k config use-context my-context。 - 考虑使用辅助工具 :社区有一些流行的小工具可以让我们更方便地切换 Context 和 Namespace,例如:
kubectx(用于切换 Context)kubens(用于切换 Namespace)
这些工具通常提供交互式选择或更简洁的命令,可以显著提高效率。可以通过包管理器(如 Homebrew, apt, yum)或直接下载二进制文件来安装它们。
- 注意
kubeconfig文件的安全性 :kubeconfig文件包含了访问集群的凭证,务必妥善保管,不要泄露给未授权的人员。
总结
管理多个 Kubernetes 集群配置并不复杂,核心就在于理解和运用 kubeconfig 文件中的 Context 概念。通过掌握 kubectl config 的几个关键子命令:
view: 查看配置概览get-contexts: 列出所有可用上下文current-context: 显示当前激活的上下文use-context <context-name>: 切换到指定的上下文
我们就能轻松地在不同的 Kubernetes 环境(如生产和测试)之间安全、高效地切换了。希望这篇回顾能帮我们重新找回操作 kubectl 多集群配置的熟悉感!